目录
DTrac Rotor
DTrac Rotor可以通过传感器自动调整旋转方位,实现动中通、智能跟踪卫星进行业余卫星通联。

规格参数
- 外壳尺寸:135x85x56 毫米
- 重量:约870g
- 工作温度:0-40摄氏度
- 防护等级:外壳 IP66
- 传感器电缆:500mm
- 电源接口:DC5.5*2.1
- 内置锂电:推荐7.2V 2600mAH
- 放电截止电压:6V
- 充电限制电压:8.4V
- 工作电压:7.2VDC
- 电流:< 200mA,带反极性保护
- WiFi 模式:802.11b/g/n
- WiFi频段:2.4GHz
- 网络控制协议:TCP Server
- 协议端口:4533
- 传感器类型:3D 磁力计/加速度计 ,新版不带传感器,使用外置传感器BLE方式接驳
- 旋转范围:方位角 +/-360 度,仰角 +/-90 度,最大单向旋转角度:450 度
- 旋转速度:0.6 -1.2 RPM
- 旋转扭矩:动态25kg.cm
- 旋转精度:< +/- 5 度(取决于当地的磁场环境)
- 旋转模式:具有可配置抗饱和算法的最短路径
- 启动时间:未配网状态 < 10秒,已配网状态 < 30秒
- 串行协议:兼容AMSAT EasyComm I、II
- 默认指向:北 (需工厂校准一次传感器)
电器原理图
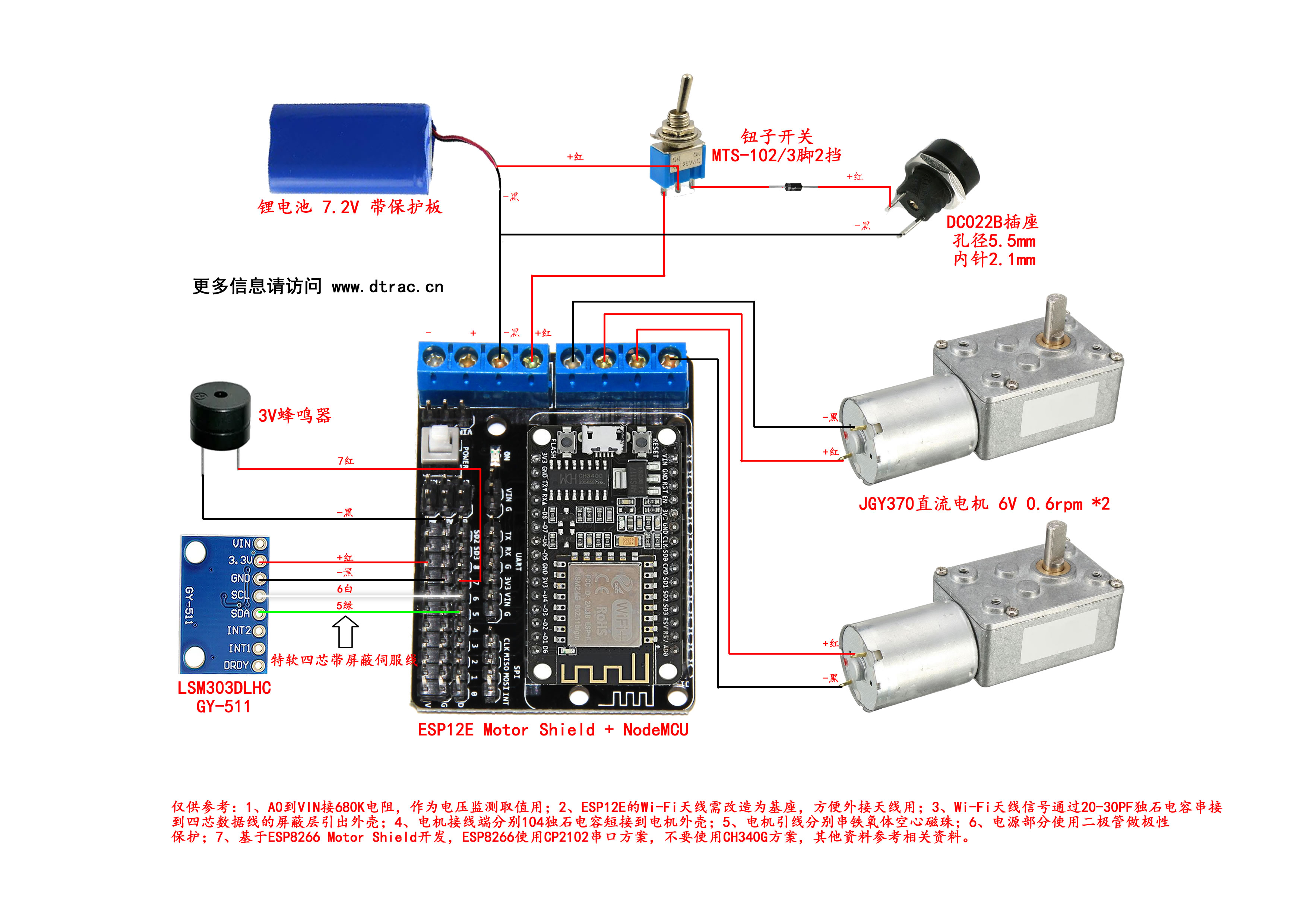
注:接线时请核对接地的正确位置,有些批次的主板实际走线会与图中显示不一致。
新版采用外置传感器BLE蓝牙方式接驳,推荐维特WT9011DCL-BT50,摆脱有线束缚,让通联更自由。详情请参考 使用姿态传感器辅助
外壳DIY

功能简介
- 在基于手机APP的卫星跟踪应用程序的控制下同步旋转卫星天线;
- 支持手机DTrac APP自动寻址接管功能;
- 在坚固的三脚架上轻巧快速地安装 - 最适合便携式操作;
- 使用安装在天线臂上的3D传感器 - 日常操作不需要任何现场定位或校准;
- 内置大扭矩直流电机 - 通过平衡提升臂控制卫星天线;
- 内置WiFi 接入点 - 无需 WiFi 路由器或热点。
- 模拟AMSAT EasyComm旋转器协议
- 可以通过任何Windows或Linux PC、macbook、笔记本电脑、Raspberry Pi等无线控制;
- 使用Gpredict™、WXtrack、WXtoImg、HRD进行测试通过,其他待定;
- 手机APP集成基于高级用户的控制、调试、监控、校准、配置等实用程序。
- 内置微控制器 - 低噪音、快速启动且无需关机程序。
- 低功率 - 运行7.2VDC时电流小于200mA,功率小于1.5W;
- 内置锂电池供电,具有电源保护板和反极性保护设计;
- 低射频干扰 - VHF/UHF 上几乎听不见的噪音。
- 高电磁兼容性 - 在 VHF/UHF 上使用 50Wrms 连续射频功率进行测试;
- 工厂校准 - 提高了指向精度和可重复性;
- 提供智能的抗缠绕算法;
- 对特定事件发出警示音;
- 两档钮子开关设计,在连续电机失速条件下提供快速断电操作以及充电操作时断开主机电源。
警示音说明
Rotor在启动、运行过程中,会对特定事件发出警示音,警示音的定义如下:
- 三长提示音(O-open),表示系统启动正常;
- 三短三长三短提示音(SOS),表示内置电池电压不足;
- 连续“滴”长音表示Rotor认证失败。
核心套件清单
- DTrac Rotor,1个;
3D传感器带线束,1条;- 新版采用外置BLE蓝牙方式接驳,型号为维特WT9011DCL-BT50,需自行采购;
其他额外的组件准备
在开始安装使用DTrac-卫星跟踪系统之前,您需要准备购买或制作以下额外组件,所有材料避免选用带磁性的材料,如:铁质材料,否则会影响磁传感器的指标。
卫星天线
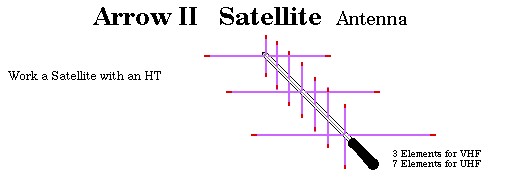
- 卫星八木天线1副带线,天线重量应小于2KG;
- 产品推荐
- Arrow II Yagi Antennas
- 麋鹿Elk Antennas 2M/440L5 双频天线
- BG7JYR UV双段十字型U7V4
- 乳酸菌的U3V2天线
铝合金三脚架
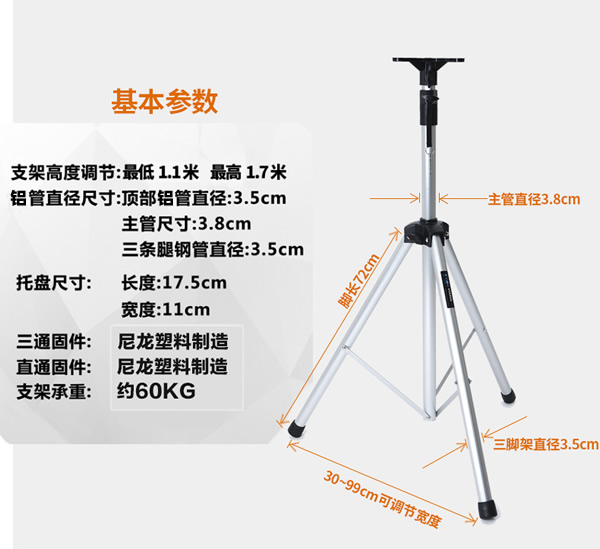
- 铝合金三脚架1个;
天线支架

*适配V3U2或U7V4天线可参考

*适配U3V2天线参考
*图片仅供参考,不同的天线,天线支架尺寸不同,需根据天线量身定制
- 角铝1根,尺寸:3*30*50mm,长度适当,如果使用轻质天线,支架尺寸可适当缩短调整;
天线配重
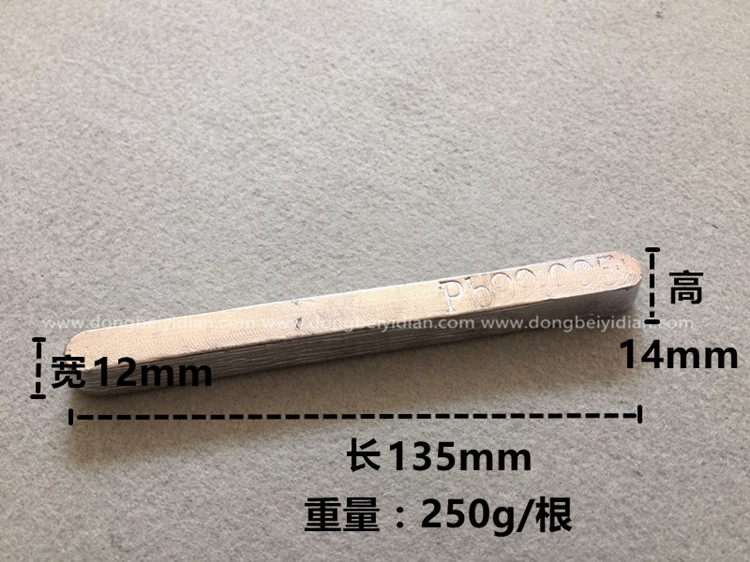
- 用于天线配重用的铅条,250g*2至3根根,根据天线重量来匹配,以平衡天线至水平状态,减少对EL电机轴的损伤。
PVC外牙堵头

- 1寸PVC外牙堵头1个,以及固定螺丝若干;
铝合金法兰
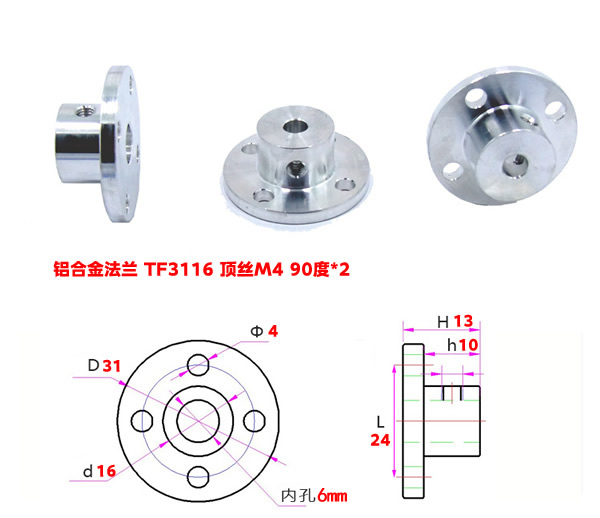
- 铝合金法兰2个,型号推荐TF3116,规格选择内孔6mm或8mm款,根据电机轴的尺寸选择,用于连接DTrac Rotor和天线支架;
- 为了便于拧紧法兰和电机轴,法兰自带两个顶丝建议替换为4mm的带帽螺丝。
充电器
仅针对充电版本,非充电版本可忽略。
- 输入电压:AC 100~240V 50/60HZ 2A
- 输出电压:DC 8.4V
- 输出电流: 2000MAH(足功率输出)
- 充电头尺寸:5.5*2.1
螺丝
- ST3.5*13自攻丝螺丝8粒,用于固定堵头和AZ法兰;
- M3*4元头螺丝带帽4套,用于固定天线支架和EL法兰。
工具推荐
顶丝扳手

规格:2*120内六角平头
使用该工具,能够很方便的旋转法兰的顶丝,快速拆装旋转器。
铝合金工具箱

推荐规格:银色+海绵36*24*10
可以很方便的把旋转器和配件稳固的放置,适合户外运输使用。
组装步骤

- 首次组装请先将三脚架自带的顶部音箱固定支架去除;
- 将AZ法兰用用规格3.5*13mm自攻螺丝固定在用1寸(32mm)的PVC外牙堵头顶部;
- 用规格3.5*13mm自攻螺丝将PVC外牙堵头固定在三脚架顶部;
- 将Rotor的AZ电机轴插入AZ法兰上,旋紧顶丝固定,注意力度不要过猛;
- 将EL法兰固定在角铝支架或天线支架合适位置;
- 将天线固定到角铝支架或天线支架合适位置;
- 将EL法兰套到到EL电机轴上,先不固定;
- 用铅条做好配重,使天线保持平衡略向前倾状态即可;
- 旋紧EL法兰顶丝固定;
- 将传感器线束航空插头插入Rotor航空插座上;
- 将传感器用橡皮筋水平固定在天线主梁末端或天线支架末端,传感器平画面紧贴支架;
- 检查无误后,将Rotor拨动开关拨到开机状态,Rotor开始初始化对北旋转;
- 天线指北后待机准备接受指令状态,此时天线EL方位应该垂直0度位置;
- 用手机APP连接Rotor,并设置好磁偏角;
- 至此,Rotor安装完毕,现在可以进行卫星跟踪操作了。
固件功能
最新的Wi-Fi版的DTrac Rotor核心采用一个ESP8266模块进行控制,定制的固件可实现以下功能:
- 磁传感器传感器和加速度传感器数据处理;
- EasyComm控制协议数据解析;
- 电机驱动;
- 校准、调试、演示、监视;
- 防缠绕保护算法;
- DTrac APP对接握手协议;
- 固件在线更新管理,分自动和手动两种模式;
- 低电压报警功能;
- 远程协助诊断调试功能;
- 可设置电机增益值;
- 硬件在线认证;
- 恢复出厂设置;
- Wi-Fi扫描和选择AP,AP密钥设置;
- 姿态传感器辅助功能,可以通过APP对接外置姿态传感器辅助控制;
- 可配置旋转器位置信息,并用可控设备协议通告位置信息;
- 支持NRL远程控制,需DTrac APP设置;
更新固件
- 注:新版可省略此步骤。先将传感器线束安装到Rotor上,航空插头旋紧固定,并去掉法兰等组件;
- DTrac Rotor在电源开启后,用Wi-Fi连接DTrac Rotor,密码是:73737373;
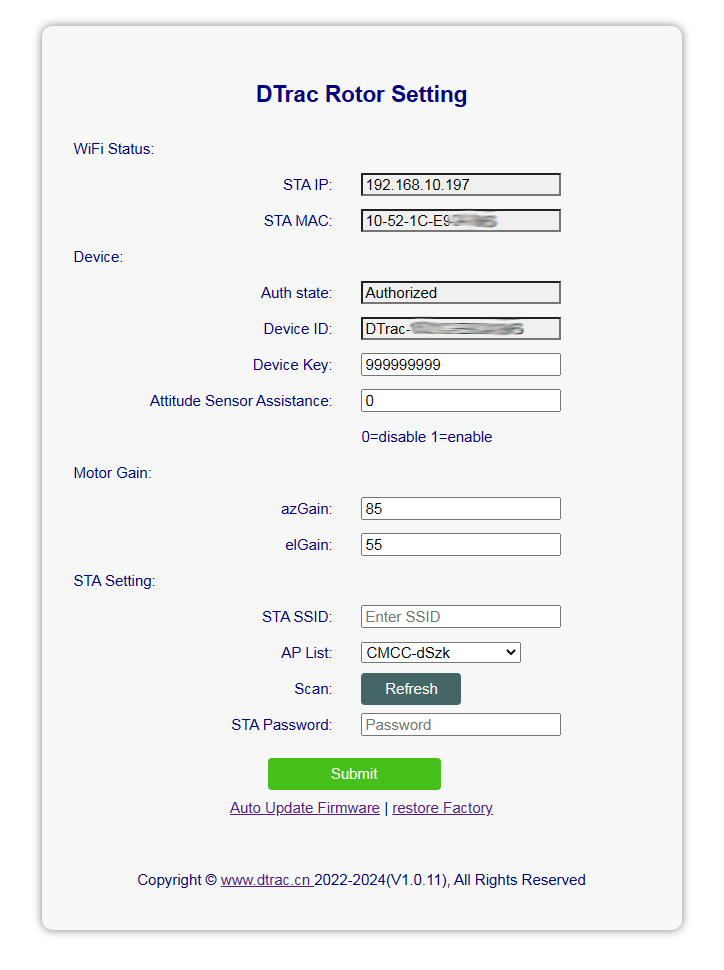
- 在浏览器输入 http://192.168.4.1 ,访问DTrac Rotor配置页面,在这个页面底部设置“STA Setting”参数“STA SSID”、“STA Password”分别对应您的无线路由器的Wi-Fi设置,点击“submit”提交保存设置,Rotor重启后,“WiFi Status”处如果获取到IP,表示Rotor成功连接互联网;
- Rotor连接互联网模式下,点击配置页面底部Auto Update Firmware,设备会自动在线更新固件,请耐心等待更新页面自动跳转到首页,或听到Rotor发出三长提示音,表示升级完成;
- 查看页面底部版本号,是否比上一版本号大,如果大表示升级成功!
- 固件更新成功后,需重新连接互联网自动激活一次才能正常工作。
传感器校准
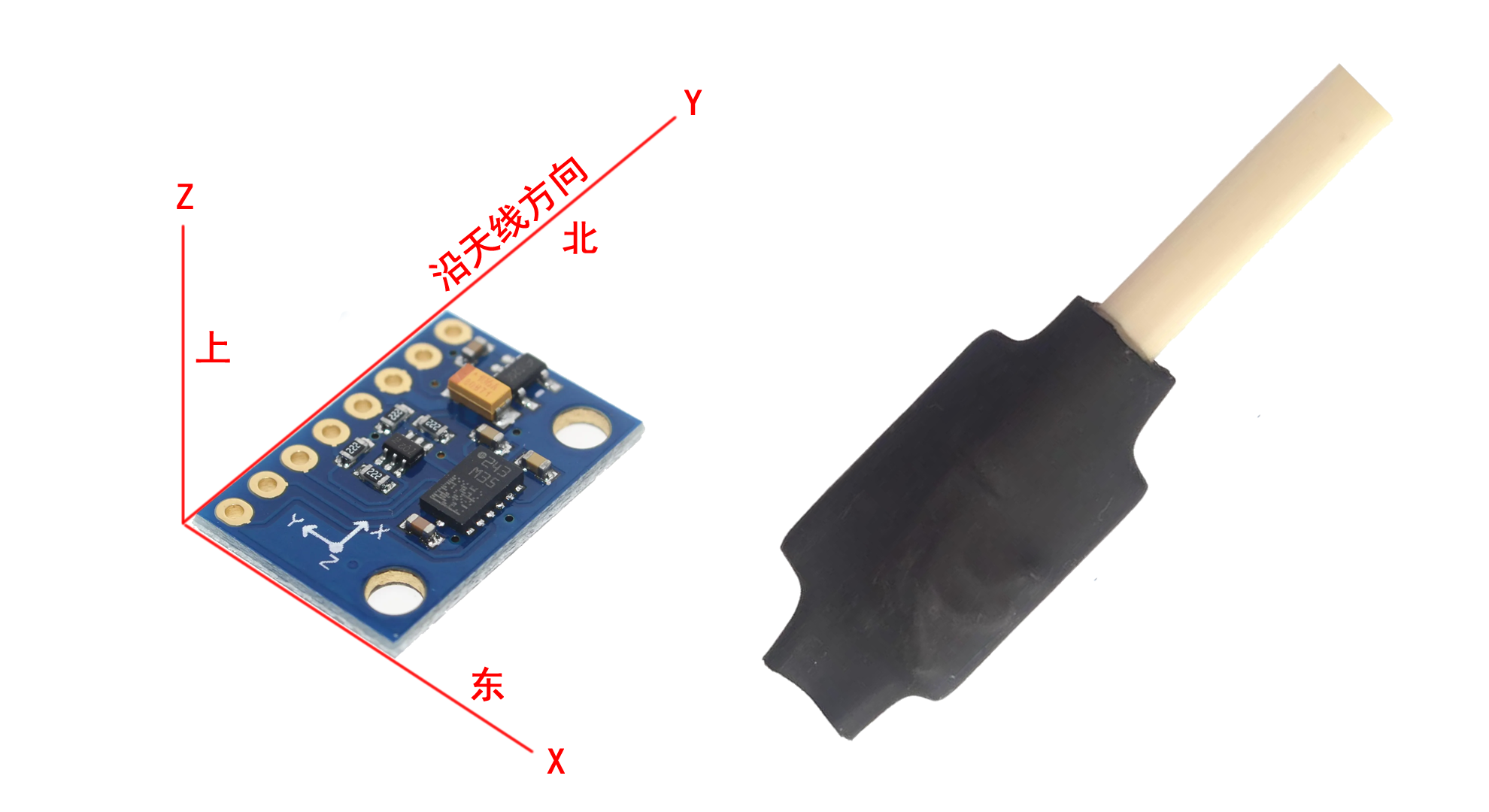
传感器型号为:GY-511 LSM303DLHC,3D磁场和加速度计。传感器连接到天线杆或配重杆上,并与天线参考轴对齐(X、Y 和 Z 如下图所示),天线水平并指向北方,X轴指向正东,Y轴指向正北(天线轴),沿天线视线,Z轴指向上方,请忽略PCB上打印的任何轴示意。校准方法见下:
- 获取您所在位置的磁偏角,用APP连接旋转器,设置您所在位置的磁偏角;
- 连续点击设置界面顶部标签栏9次,进入调试模式;
- 点击APP底部调试标签导航到调试界面;
- 点击校准按钮,进入校准模式,开始校准操作;
- 粗略校准。将传感器Y轴(丝印为X轴)水平对准正北,分别沿X轴和Y轴缓慢旋转传感器一周,可反复操作,直到旋转器停止发出蜂鸣声;
- 精细校准。把传感器想象成一个有六个面的立方体,你需要将每个面指向地球磁场的方向,并再次指向地球引力场的方向。共有12个方向,您必须在每个方向周围轻微移动传感器,并保持几秒钟,直到旋转器停止发出蜂鸣声;
- 校准完成后,点击保存按钮,保存校准结果;
- 一旦正确完成校准,就不需要重复校准,除非您的磁偏角或传感器附近的磁性条件发生变化。
调试命令参考
输入两个整数AZ和EL,以度为单位,用空格分隔,可以手动控制旋转器。例如,270 45\n 注意:此处的AZ可采用0~180~360或-180~0~180度格式。
- h-帮助
- r-重置。显示校准数据,并将旋转器重置到原始位置
- e-输入磁偏角。例如e11.7\n。偏向东是正值,偏向西是负值
- c-校准模式。仅当校准数据产生较大误差时才校准操作
- s-保存磁偏角和校准数据
- a-中止校准、监控或演示模式
- d-演示模式。循环跟踪以下AZ/EL点:0/0、90/90、0/180、90/90/0、-90/90、-180/0、-90/90、0/0
- b-调试模式。显示原始传感器数据:Mx、My、Mz、Gx、Gy、Gz。
- m-监视模式。显示当前AZ和EL、设定点AZ和EL、AZ卷绕角度、AZ卷绕状态、AZ和EL误差
- p-暂停 ======
特别提示:调试命令行需加上换行符 \r 才能执行,角度控制命令需加换行符 \n 才能执行。
注意事项
请仔细阅读以下内容,我们对以下情况不承担任何责任或义务:
- 只能在成人监督下使用,绝不能在无人看管的情况下操作;
- 遇到缠绕或电机失速时请立即断开电源,以免造成任何损坏或伤害;
- 可能在没有警告的情况下向任何方向旋转连接的天线;
- 建议安装适当的安全防护装置、警示标牌;
- 不适合固定或永久户外安装;
- 当心眼睛受到伤害 - 移动的卫星天线振子是尖锐的,建议保护好眼睛,防止受伤;
- 当心触电危险 - 不要在高压电源线附近使用;
- 谨防雷击危险 - 请勿在雷暴、雨天或大风条件下使用。
安全测试
我们对完成的产品进行了以下安全测试:
- 人体影响:操作人员在与天线的全功率撞击下没有受到伤害(即使天线不动,也可能对眼睛造成伤害);
- 天线撞击:卫星天线元件在与静止物体的全功率撞击或连续约束条件下没有损坏;
- 电机堵转:电机在连续、全功率、堵转的情况下不会过热或消耗过多电流;
- 电缆缠绕:电机提供 50kg.cm 的静态扭矩,可以轻松剥离缠绕在电机轴上的电缆。
使用限制
- 虽然电机扭矩最大支持25Kg/cm,但推荐使用旋转单个小于 2 公斤八木天线(含天线配重),更符合便携的气质和体验;
- 电机是轻型的:强迫它们、跌落或撞击三脚架可能会剥落金属齿轮;
- 靠近传感器的任何磁铁都可能使其磁化,从而使工厂校准失效;
- 如果传感器位于任何磁性材料附近,设备将无法正确跟踪;
- 除非传感器牢固地安装在平衡提升臂上,否则设备将振荡;
- 除非牢固地安装在坚固的支架上,例如铝合金三脚架,否则设备会振荡;
- 如果使用大功率发射 (> 25W) 操作,设备将可能无法正确跟踪。
常见问题
搜索不到旋转器Wi-Fi热点
因为旋转器使用传感器线束的屏蔽层兼做Wi-Fi天线,如果手机离旋转器较远,可能无法通过手机控制旋转器,故在使用前,请先将传感器通过航空插座与旋转器连接好。
手机直连旋转器热点断流的问题
部分安卓手机直连旋转器Wi-Fi热点会出现断流故障,可以关闭手机的移动网络,并在WLAN网络助理里面,将数据网络加速或自动切换数据网络选项禁用即可。
旋转器不接受指令动作
旋转器不接受终端的指令控制动作,无论是APP还是端口调试,出现此种情况可能是旋转器没有激活,请先将旋转器配网连接到互联网自动激活一次即可。
开机后启动慢
开机后启动慢的原因是,是因为在旋转器Wi-Fi设置STA Seting中设置了AP参数,开机时会反复主动连接此AP,当连接超时后才跳过此步骤执行开机后续动作。可以删除此配置,让旋转器每次开机时主动跳过此步骤。如果你使用无线局域网组网方式,必须保留此设置。如果你使用手机直连旋转器,可以清空此设置。
齿隙现象
由于Rotor使用大扭矩直流减速电机,其内部系由齿轮组传动,先天原因会产生齿隙,齿隙经过天线放大后,在天线垂直过顶时段,会产生搓顿感,挫顿幅度不大一般可忽略。解决方案:1、可在调整天线配重时,略向天线前端倾斜,让天线前端始终受力;2、使用胶垫环,套入电机轴,使电机轴产生一摩擦力。
天线垂直方向晃动幅度大
造成此现象的主要原因是在负重较重天线时,由于法兰自带的顶丝容易打滑固定不紧所致。解决方案:用4mm的带帽螺丝替换法兰自带的顶丝,会更紧固。
Wi-Fi连接不上
发生Wi-Fi连接不上的几率较小,但不代表不会发生。Rotor固定使用第13信道提供服务,如果周边有13信道强信号干扰时,可能会发生连接不上Rotor的现象。
Rotor与AZ法兰摩擦
当AZ轴插入AZ法兰过深时,Rotor外壳可能会与AZ法兰接触,在Rotor工作时会相互摩擦,甚至导致电机停转。解决方案:1、AZ轴插入AZ法兰适当位置,保持距离;2、在AZ法兰轴孔内放置一定厚度的垫片,使AZ轴与AZ法兰保持适当距离。
其他
由于运输过程中的冲击和振动,电机电刷可能有从换向器上抬起的倾向。通常只需将一根压扁的木牙签插进新月形的孔中,间歇通电刺激电刷,就能使它们恢复正常工作。也可能润滑油脂在运输过程中震动到换向器上,导致接触不良,电机电流过小扭矩降低,需要通过孔喷异丙醇,以清除掉换向器上的润滑油脂。
演示视频
- 测试接收ISS国际空间站的信号实录 视频 https://www.douyin.com/video/7083454633884126464
- 测试接收SO-50业余卫星信号实录 https://www.douyin.com/video/7290183550706388265
- ISS国际空间站通联实录,OP:BG6BKU https://www.douyin.com/video/7290915552678251831
- 更多视频请访问我的抖音,网址 https://v.douyin.com/icdEJ7e/
如何购买
DTrac Rotor核心套件,为手工DIY制品,但力求每个成品都是精品,玩家需有一定的DIY动手能力,介意者勿拍。目前仅支持闲鱼交易,闲鱼号:BG6UD,请先加微信(4227021,验证:DTrac),然后邀请您进群获得支持。